STEPS OF DA VINCI DOCKING:
STEPS OF DOCKING:
- Position patient and OR table, including table tilt.
- Position patient cart over patient.
- Set patient cart brakes.
- Docking the camera arm.
- Docking the instrument arms.
- Check system setup.
The patient table should be positioned according to surgeon preference (depending on the contemplated procedure) before docking the robotic arms. Once the arms are docked to the ports and instruments placed, patient position should not be changed. The pneumoperitoneum is created and the ports inserted by either the lead surgeon or the patient side assistant surgeon.
PORT PLACEMENT:
The port positions vary from patient to patient, procedure to procedure and surgeon to surgeon. It is very difficult to form guidelines specific position of ports but broad guidelines are framed to maximise endoscopic view, instrument reach and to minimise external arm clashing.
Camera port is inserted keeping following principles in mind:
- Should be in line with the target anatomy (TA).
- Should be at 10-20 cm distance from the TA.
- Should be in line with the center column of the patient cart.
A diagnostic laparoscopy is done after insertion of the camera port to look for safe entry, any adhesions and surgical feasibility. A disposable 12 mm trocar cannula assembly is used as the camera port. There are specialised camera arm cannula mounts (on the patient cart camera arm) corresponding to each validated third party cannula.
Working Ports in da Vinci Robot
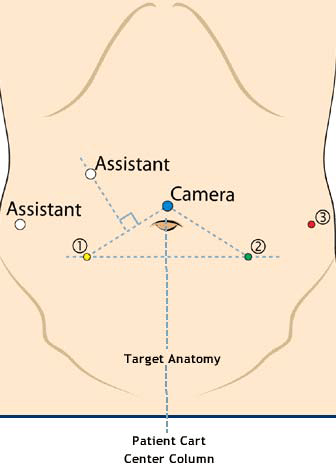
8 mm da vinci ports are inserted for robotic arms are inserted keeping in mind the following principles:
- >8 cm distance between the da vinci ports (Fig. 7A).
- 10-20 cm distance should be maintained between the dv ports and target anatomy
10 cm distance from TA is good but 20 cm distance is better. Ports placed closed to the target anatomy impedes the view of the surgical site and makes the operation technically challenging. Conversely, ports placed >20 cm from TA makes it difficult to see or reach with robotic instruments. Assistant port if needed is inserted 5-10 cm away from the da vinci ports in the desirable position. 5 mm or 10 mm ports can be used according to the intended function of the port. Da Vinci provides 8 mm reusable cannulas with disposable seals for the robotic arms. They come with bladeless obturator for insertion.
These come in two lengths:
- Short (11 cm cannula)
- Long (16 cm cannula) for high BMI patients.
Remote Center Technology

Remote center is the fixed point in the space around which surgical arm and cannula move. It helps in manoeuvring instruments/endoscopes in surgical site while exerting minimal force on the abdominal or thoracic wall. It is marked on the da vinci cannulae at a point to minimise stress to the patient. Remote center can be adjusted on patient side at the patient cart using the clutch button.
the Patient Cart
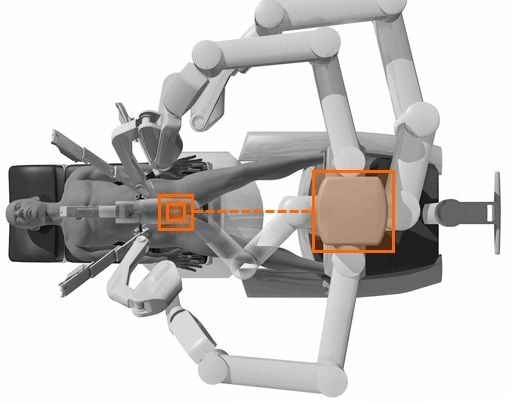
Once the patient is positioned and the ports are inserted, it is time to attach patient cart instrument arms to the patient in a process called docking. Before moving patient cart into position over the patient, it is important to align the OR table and the patient. Then push the patient cart over the patient using the motor drive on the cart.
Docking the Camera Arm
Camera arm should be docked first after positioning the patient cart. Align the camera port, target anatomy and the center column of the patient cart. Use clutch button to change the angle of camera arm to match the of cannula so that it points to target anatomy. Stabilise the cannula at the port site with one hand pointing it towards the target anatomy. Bring cannula into the cannula mount on the camera arm and clip both wings shut to hold the cannula in place.
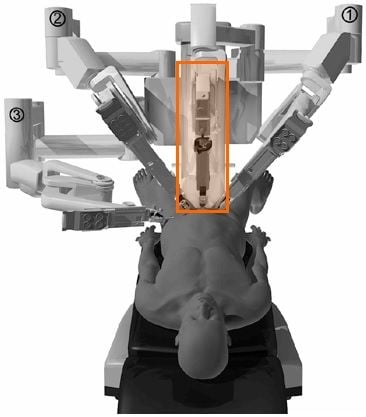
Camera arm setup joint #2 is placed opposite the instrument arm 3. Setup joints are numbered starting from the joint closest to the center column. Setting the system in this position allows maximum range of motion for all instrument arms. There is a thick blue line and a blue arrow on setup joint #2 on the camera arm indicating the sweet spot. Sweet spot should be aligned by lining up the blue arrow within the boundaries of blue line. Setting sweet spot gives patient cart arms maximum range of motion ensuring instrument and endoscope reach of all parts of target anatomy. Remember that overextending or not extending the camera arm enough will limit the instrument range of motion. Align the camera arm clutch button, 3rd setup joint and the center column. Strive to maintain the sweet spot and alignment of the camera arm throughout the docking process.
Docking of Instrument Arms
After docking the camera arm, instrument arms are positioned in place so as to allow maximum range of motion of the arms. It is done in following steps: a. Position the instrument arm with the arm number and sterile adaptor facing forwards. Allow approximately 45 degree angle between each arm. Note that the position of instrument arm 3 can vary according to patient body habitus and the procedure. After positioning, ensure that the arms will not collide with the patient or interfere with each other. Dock the instrument arms by bringing them to the cannula using the port clutch button. Bring the instrument arm to the cannula and lock the wings of the quick click cannula mount on the arm to clip the arm to the cannula. Confirm that the remote center of the port is present at the desired place in the abdominal wall. Remember to stabilise the cannula with one hand at the port site while docking the instrument arm.
Checking System Setup
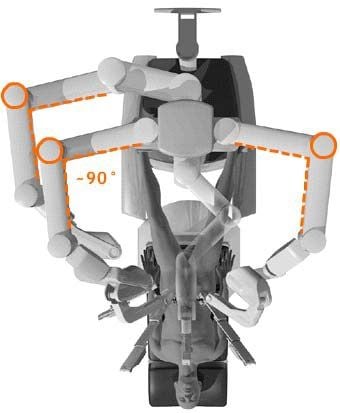
After docking the instrument arms, check the arm setup. Start by confirming that the sweet spot of the camera arm is in right position (i.e. arrow is pointing towards the thick blue line). If needed, move the arm back into position taking care to stabilise the cannula at the port site. Next, check the alignment of the camera port, target anatomy and the center column of the patient cart. Now check the instrument arm setup. Separate the instrument arms to maximise the range of motion. Check the setup joint angles to minimise potential collisions. The angle at the setup joint 2 should be approximately 90 degree so that depicts the correct method of docking the patient cart. Endoscope Insertion and Removal First, insert the endoscope into the cannula keeping the intuitive logo on the camera head facing the camera arm. Place the body of the endoscope into the camera arm sterile adaptor making sure that the body of endoscope is fully connected. Give it a gentle turn to ensure it is locked in place.
World Laparoscopy Hospital, Cyber City, DLF Phase II, Gurugram, NCR Delhi, 122 002, India
PHONES:
For Training: +919811416838
For Treatment: +919811912768
For General Enquiry: +91(0)124 - 2351555